With the growing level of automation, machine vision has become an essential part of modern manufacturing. Traditional 2D positioning systems are limited in their ability to capture spatial coordinate information, making it difficult to handle complex tasks. In contrast, 3D binocular stereo vision offers higher precision by capturing depth and spatial data. This is particularly important in industries like automotive manufacturing, where robots are responsible for handling parts such as the rear floor panel. A major challenge arises because the plane coordinates (XYR) and spatial coordinates (ZWP) of each backplane differ significantly. The robot’s fixture must accurately insert two sharp points into specific holes on the backplate, requiring precise spatial alignment.
Huiyan Automation Technology (Guangzhou) Co., Ltd. has developed a professional machine vision system that addresses these challenges. They have created a 3D binocular vision software system capable of calculating the six spatial coordinates (XYZWPR) of the rear floor panel with high accuracy. By transmitting this data to the robot, they successfully solved the customer's problem, improving efficiency and reducing errors in the assembly process.
**2. 3D Binocular Stereo Vision System: Installation and Principle**
**2.1 Installation Method**
The system uses two industrial cameras and light sources mounted at both ends of the robot's flange. This setup allows for accurate image capture from different angles, which is essential for 3D reconstruction. As shown in Figure 1, the cameras are positioned to cover the entire working area of the robot.

*Figure 1: Camera and light source installation*
**2.2 Principle**
The first step involves calibrating the system using a calibration plate to establish the relationship between the camera, image, and robot coordinate systems. This ensures that all measurements are accurate and consistent.
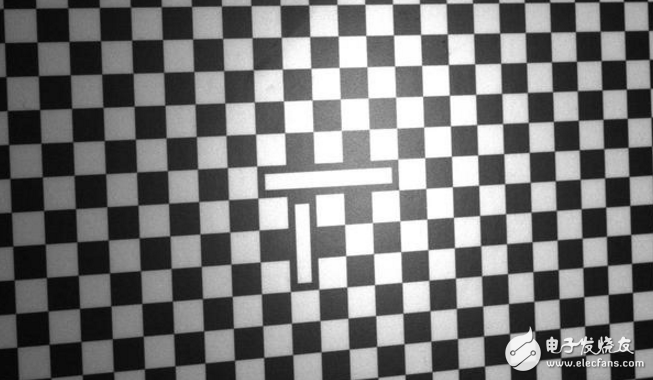
*Figure 2: Calibration correction*
Next, images are captured from three different positions of the rear floor panel. Feature matching is performed, and the coordinates (XYZ) of each feature are calculated using the parallax principle. This provides detailed spatial information about the object.
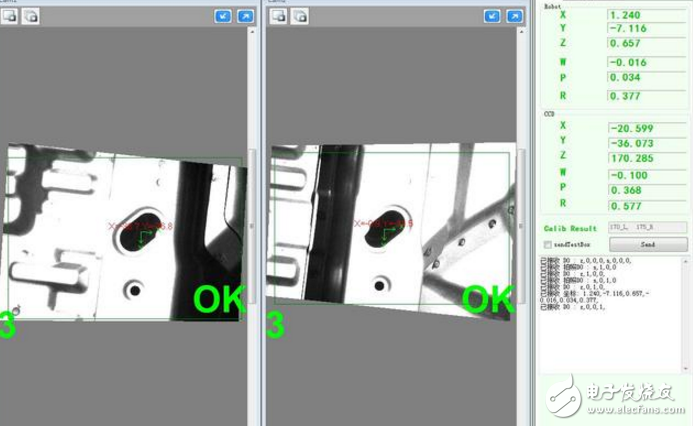
*Figure 3: Software interface*
Based on the matched features, the full 3D spatial coordinates (XYZWPR) of the backplate are calculated. These coordinates are then sent to the robot via TCP/IP protocol, allowing it to perform precise movements.
**3. Future Prospects**
The 3D binocular stereo vision system effectively gives the robot "eyes," enabling it to perceive its environment in three dimensions. This technology overcomes the limitations of 2D systems, significantly improving production efficiency and reducing manual labor. It can be applied in various industrial scenarios, including part identification, palletizing, and robotic guidance.
As the use of industrial robots continues to grow, the demand for advanced vision systems like 3D binocular stereo vision will increase. With ongoing developments in AI and computer vision, this technology is set to play a crucial role in smart manufacturing and automation, offering more accurate, reliable, and efficient solutions for complex tasks.
Consumer Electronics
DongGuan BoFan Technology Co.,Ltd. , https://www.ufriendcc.com