An old-fashioned fall detection system based on a single-chip microcontroller has been developed. It utilizes an accelerometer and gyroscope sensor to capture raw motion data. To enhance the accuracy of the collected signals, an adaptive complementary filtering algorithm is applied during data fusion, effectively reducing noise in the frequency domain. A lightweight fall detection algorithm was specifically designed for this device, along with the integration of a GPS positioning module and a GSM short message communication unit. Experimental results demonstrate that the fall detection algorithm is computationally efficient, has a low false positive rate, and provides accurate location tracking.
Research highlights that falls among the elderly are both frequent and dangerous, often leading to severe injuries or even death. As people age, their risk of falling increases significantly. Timely intervention after a fall can drastically reduce mortality rates, making early detection systems essential for elderly care.
Currently, two main technologies are used in fall detection systems: image-based analysis and acceleration-based analysis. While image analysis offers high accuracy, it is complex, expensive, and not easily portable. On the other hand, acceleration-based methods are more cost-effective, require less power, and are easier to carry, making them ideal for wearable devices.
1. System Overall Design
This system employs the six-axis MPU6050 gyroscope and accelerometer to collect initial motion data at a sampling frequency of 100 Hz. During attitude calculation, a complementary filter is used for signal processing, and the three-axis acceleration data is preprocessed to obtain the combined acceleration. To improve detection accuracy, a three-level fall detection algorithm is implemented, using both the attitude angle and the combined acceleration as key features. Once a fall is detected, the system immediately locates the user's position and triggers an alarm. If no manual cancellation occurs within 30 seconds, the buzzer activates, and an alert message is sent to the designated phone number and emergency services. The system also includes a one-button alarm feature, allowing family members to request the elderly person’s current location via SMS, helping to prevent wandering or getting lost.
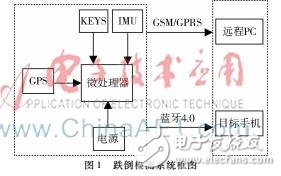
The hardware components include an Inertial Measurement Unit (IMU), a GSM/GPRS module, a GPS positioning module, a Bluetooth 4.0 module, a STM32F103ZET6 microcontroller, a power supply module, and user interface buttons. The system architecture is illustrated in Figure 1.
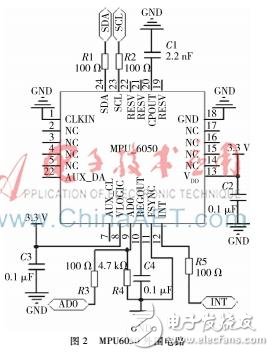
The IMU uses the InvenSense MPU6050 chip, which measures three-axis acceleration and three-axis angular velocity simultaneously, and outputs digital values. The selected acceleration range is ±8g, while the gyroscope range is ±1000 dps, meeting the system's requirements. The internal digital motion processor simplifies development by handling attitude calculations efficiently. The peripheral circuit is shown in Figure 2.
The GPS module uses the UBX NEO-6M, known for its compact size, low power consumption, strong satellite search capability, and compatibility with various active antennas, making it suitable for portable applications.
The GSM/GPRS module is based on the SIMCOM SIM800 chip, supporting low-power voice and data transmission. Users can send AT commands to make calls, receive SMS messages, and connect to GPRS networks.
The Bluetooth 4.0 module uses the HM-13 series, offering low power consumption and long battery life—ideal for portable devices. This technology allows the system to operate for months on a small coin battery, enhancing usability and convenience.
The button functions include manual alarm activation and cancellation, reducing system errors and user inconvenience. It also supports a one-button emergency alert for quick response.
2. Fall Detection Algorithm
2.1 Feature Preprocessing
During movement, the accelerations measured along the X, Y, and Z axes are denoted as a2x, a2y, and a2z, respectively. The resultant acceleration is calculated as the square root of the sum of the squares of these three components. This magnitude reflects the intensity of human motion and serves as a critical feature in fall detection.
2.2 Attitude Calculation
The body's attitude angle is derived from integrating the angular velocity. Although this method provides high short-term precision, the gyroscope suffers from drift errors, which accumulate over time and lead to inaccuracies. Conversely, the acceleration sensor does not suffer from time-dependent error accumulation but introduces white noise during motion, resulting in lower short-term accuracy.
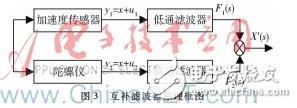
To address these limitations, an adaptive complementary filter is employed. This approach leverages the strengths of both sensors—using the gyroscope for high-frequency dynamic responses and the accelerometer for low-frequency stability. By combining them, the system achieves a reliable and stable attitude angle. The block diagram of the complementary filter is shown in Figure 3.
Chamfered Radiator,Galvanized Chamfered Radiator,Corrosion Resistant Chamfered Radiator,Power Transformer Chamfered Radiator
Shenyang Tiantong Electricity Co., Ltd. , https://www.ttradiator.com